教授
工学研究科
電気電子工学専攻
電気システム工学
研究分野: 制御工学
現在,産業のさまざまな分野で人手不足が深刻化しており,生産現場でのロボットを用いた製造プロセスの自動化が求められています。製造プロセスの自動化には複数のパラメータの調整が要求されていますが,熟練のエンジニアによる調整が主流であり,この調整プロセスの自動化・省力化が大きな課題となっています。一方,データサイエンスの急速な発展によりプロセスでの各種データが入手が容易となってきており,これらの現場から得られる生データから直接自動化に必要なパラメータの調整を最適化に基づいて行う手法の開発を行っています。これらの手法の開発により,パラメータ調整に対して数学的な最適性を保証でき,エンジニアの負担を軽減し,効率的に製造プロセスのの設立が可能となります。
ロボットなどを制御するためには制御器を設計する必要がありますが,これらを適切に設計・調整することが制御エンジニアに課せられた課題です。これまで多くの研究者が制御器の設計法について提案してきましたが,その多くは難解な理論に基づいており,現場のエンジニアにとっては活用が難しいものでした。我々の研究グループではこの制御器の設計・調整に対して,制御したい対象の入出力の応答データが得られれば簡単に調整が可能となるアルゴリズムの開発を行っており,これまでロボットなどのメカトロニクス機器を中心に実装を行い,有効性を示しています。
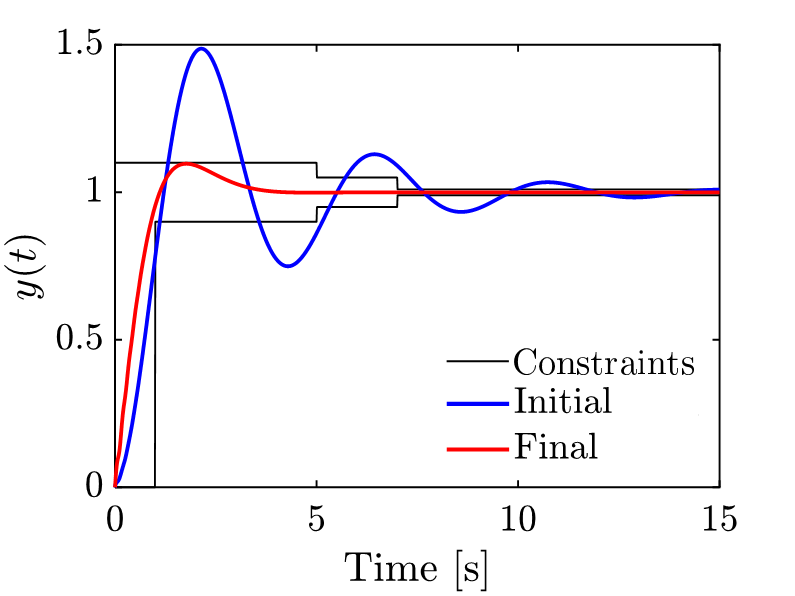
現在の研究を進めることで,これまで難解であったり,熟練エンジニアに頼っていた制御器調整を経験の少ないエンジニアにも可能にするアルゴリズムの構築を目指していきたいと考えています。また,これまで非常に困難な問題と考えられていた時間応答に制約が課せられた制御器調整についても取り組んでいます。これらの研究成果を実際の製造現場に適用していきたいと考えています。
産業機器を模擬した二慣性共振システム 実験装置

時間応答の制約を考慮した制御器調整
広島県生まれ。2000年3月名古屋大学大学院工学研究科博士課程後期課程電気電子工学専攻修了後,2000年4月より三重大学工学部電気電子工学科助手,2009年11月同大大学院工学研究科電気電子工学専攻准教授を経て,2020年10月より教授。博士(工学)