教授
生物資源学研究科
共生環境学専攻
環境情報システム工学
研究分野: フードシステム学教育研究分野
生産者の減少や高齢化問題が深刻化している中,食料の生産力向上と持続性の両立を実現するために,熟練作業者の作業ノウハウを学習可能な農業ロボットを開発し,農作業現場に新しい労働力を供給する.
(研究)作業者の行動を追跡し,作業の流れを理解するシステムを開発した.民間企業との共同研究の成果として,画像処理システムを独自に開発し,そのシステムを搭載した商品「粒状物外観測定器」が2012年に世界同時発売された.筆頭発明者として国内特許と国際特許が出願された.別の画像処理システムとして「太陽電池セル検査プログラム」も独自開発し,こちらも筆頭発明者として国内特許と国際特許が出願された.
現在,柑橘果実栽培収穫ロボットを開発中であり,車両の自律走行,ロボットアーム・ハンド制御,画像や各種センサを用いた環境認識,作業者の動きに合わせたロボットの走行制御など,各種システムを開発している.
(社会貢献)三重県農業研究所の茶収量予測用AIや茶園害虫検出AIの開発環境の整備と研究支援を行った.三重県南牟婁郡御浜町の村づくり&DX推進事業に参画している.
「柑橘果実栽培収穫ロボットの開発プロジェクト」において,農業ロボットの開発に必要な自律走行プログラム,環境認識プログラム,ロボットマニピュレータ制御プログラムを開発し,さらにロボットと作業者による協調作業を実現するAIシステムと作業ノウハウを蓄積可能なAIシステムを開発する.最終的に,農業ロボット用パッケージを開発することによって,農業ロボットを活用した新しい労働力の創出を目指す.

農業ロボットの開発
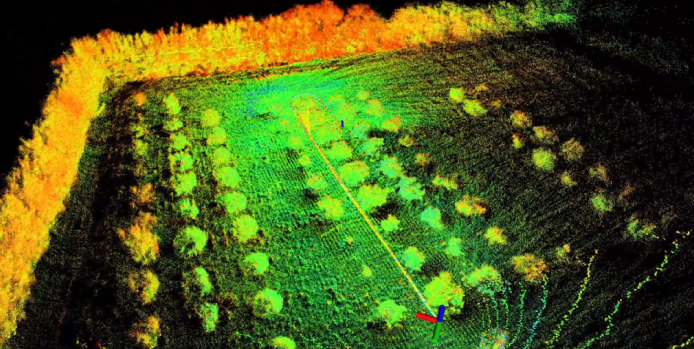
ロボット走行用環境地図(柑橘圃場)
和歌山県.京都大学大学院農学研究科助手として採用され(1995.7-2001.3),三重大学大学院生物資源学研究科に転任し,現在に至る(2001.4-).
農業食料工学会の評議員(2013-現在),関西支部幹事(2013-現在),関西支部情報委員会委員長(2019-現在),産官学連携委員会幹事(2017-2018),Engineering in Agriculture, Environment and Food編集委員(2015-2016),関西支部情報委員会委員長(2013-2014),関西支部企画委員会委員長(2008-2009),地域密着委員会幹事(2005-2006),国際交流委員会幹事(2003-2005).
平成22年8月 農業機械学会関西支部賞